

di Chiara Volontè ♦︎ Il big dell’automazione ha presentato i nuovi progetti futuribili: BionicSoftHand, BionicSoftArm e BionicFinWave. Con la sostituzione delle pinze un nuovo step nell’ambito della robotica collaborativa
Afferrare, trattenere, girare, tastare, digitare o premere. Ogni giorno usiamo le mani per diversi tipi di attività. La mano umana, con la sua unica combinazione di forza, destrezza e doti motorie è una vera e propria meraviglia della natura. Perché non dotare i robot negli spazi di lavoro collaborativi di una pinza ispirata all’esempio fornito dalla natura, e far sì che grazie all’intelligenza artificiale possano imparare a eseguire diverse mansioni? E’ l’obiettivo di Festo, che ha recentemente presentato la mano robotica pneumatica alla Hannover Messe 2019. Combinata al BionicSoftArm, rende questo robot pneumatico in struttura leggera adatto ai Future Concept per la collaborazione tra uomo e robot.
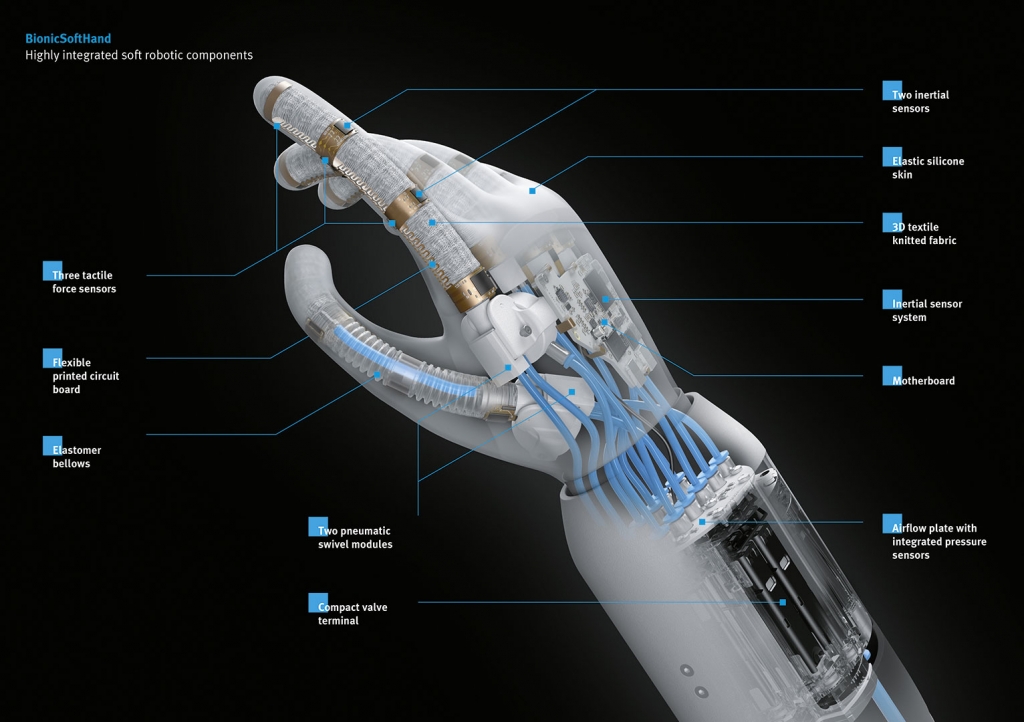
Al contrario della mano umana, la BionicSoftHand non ha ossa. Le sue dita sono costituite da strutture a soffietto con camere d’aria. Il suo funzionamento è pneumatico, affinché possa interagire in maniera sicura e diretta con le persone.Un rivestimento speciale 3D, lavorato con fili elastici e fili ad alta resistenza, avvolge i soffietti nelle dita. In questo modo, tramite il tessuto si può determinare in quale punto la struttura si allunga e distende la forza, e in quale punto viene impedita la distensione. Questo rende la mano bionica leggermente flessibile, adattabile e sensibile e, allo stesso tempo, capace di esercitare una forza elevata.


Intelligenza artificiale
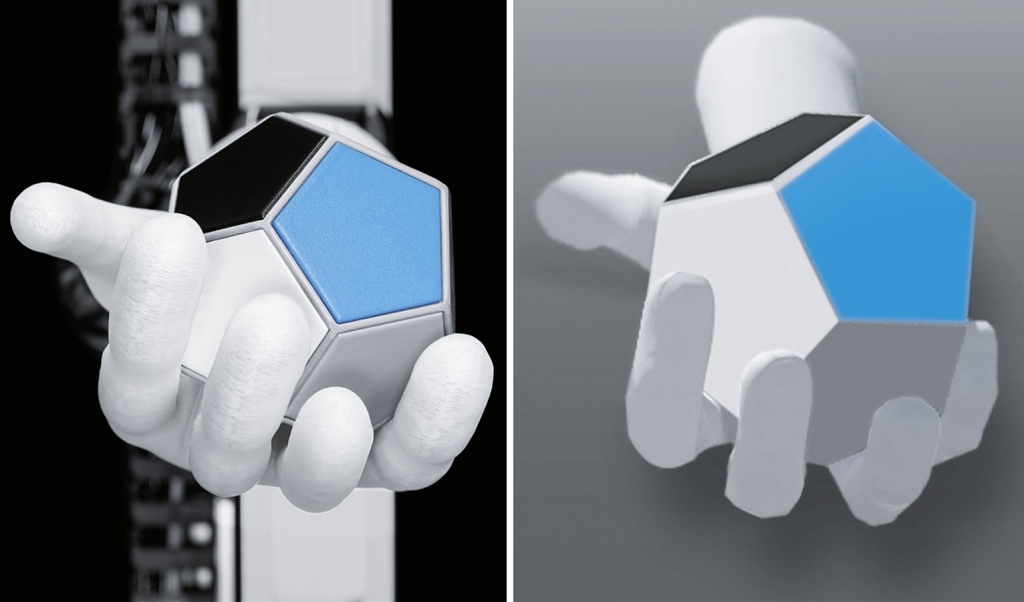
Per la BionicSoftHand viene utilizzato il metodo del Reinforcement Learning, ossia l’apprendimento per rinforzo. Questo significa che, invece di dover imitare un comportamento concreto, la mano deve solamente raggiungere un obiettivo prestabilito. La mano prova a raggiungere questo obiettivo con diversi tentativi (trial and error). In base ai feedback ottenuti ottimizza gradualmente le sue azioni fino a eseguire con successo la mansione prestabilita. In concreto, la BionicSoftHand viene allenata a girare un dado da dodici lati, in modo che alla fine il lato predefinito sia rivolto verso l’alto. L’apprendimento delle strategie di movimento necessarie ha luogo in un ambiente virtuale, in base a un gemello digitale creato con l’aiuto dei dati di una fotocamera di profondità e di un algoritmo dell’intelligenza artificiale.
Piezo-valvole proporzionali per una regolazione precisa
Per mantenere più ridotto possibile il cablaggio necessario per la BionicSoftHand, gli sviluppatori hanno costruito appositamente una piccola unità di valvole, regolata digitalmente, da applicare direttamente sotto alla mano. In questo modo non è necessario che i tubi per l’attivazione delle dita attraversino l’intero braccio del robot. Così è possibile collegare e mettere in funzione la BionicSoftHand in modo rapido e semplice mediante un unico tubo per l’aria di alimentazione e di scarico. Le piezo-valvole proporzionali impiegate permettono di regolare con precisione i movimenti delle dita.

BionicSoftArm: un unico braccio robot con diverse possibilità di variazione
La rigorosa distinzione tra il lavoro umano e le azioni automatizzate dei robot continua a diminuire. Le loro aree di lavoro si fondono in un ambiente collaborativo, dove ai robot viene richiesto soprattutto di essere flessibili e adattarsi a diverse situazioni. Grazie al BionicSoftArm, un braccio per robot pneumatico e flessibile, in futuro le persone e le macchine potranno lavorare insieme allo stesso pezzo, senza doversi schermare l’uno dall’altro.
BionicMotionRobot
Il BionicSoftArm è un ulteriore sviluppo compatto del BionicMotionRobot di Festo con uno spettro di applicazione nettamente ampliato. Questo è reso possibile dalla sua struttura modulare: può essere combinato con fino a sette segmenti pneumatici a soffietto e attuatori rotativi. In questo modo diviene flessibile al massimo nel suo raggio d’azione e nei suoi movimenti e, se necessario, è in grado di lavorare anche negli spazi più angusti e di evitare gli ostacoli. Al contempo, è totalmente flessibile e può lavorare con le persone in tutta sicurezza. Il BionicSoftArm rende possibile la collaborazione diretta tra umani e robot e anche l’impiego per classiche applicazioni SCARA, come ad esempio le mansioni pick & place. Il braccio per robot modulare può essere utilizzato per diverse applicazioni in base alla sua struttura e alla pinza montata. La sua cinematica flessibile facilita il suo adattamento a diverse mansioni in diverse posizioni. Il venir meno di costose configurazioni di sicurezza, come gabbie o sensori ottici a barriera, riduce i tempi di trasformazione e permette un utilizzo flessibile, nello spirito di una produzione versatile ed economica.
BionicFinWave: robot subacquei
La natura ci mostra con esempi impressionanti quale sia l’aspetto di un sistema di propulsione ideale per determinati movimenti natatori. Per andare avanti, i policladi e le seppie creano con le pinne un’onda che si propaga in avanti per la loro intera lunghezza. Il team di bionica si è ispirato a questi movimenti ondulatori delle pinne per la BionicFinWave. Il movimento ondulatorio spinge l’acqua indietro, generando così una spinta in avanti. In base a questo principio, la BionicFinWave si muove in avanti o indietro grazie a un sistema di tubazioni in polimetilmetacrilato. Entrambe le pinne laterali sono ricoperte completamente in silicone e funzionano senza controventamenti o altri elementi di sostegno. Le due pinne di sinistra e destra sono fissate a nove piccoli bracci della leva che vengono azionati da due servomotori. Due alberi motore adiacenti trasmettono la potenza alla leva, in modo che le due pinne possano muoversi individualmente e generare diversi tipi di onde. Gli alberi sono adatti in particolare ad andature lente e precise, e fanno girare in vortice meno acqua rispetto, ad esempio, alla propulsione ad avvitamento. Tra ogni segmento della leva si trova un giunto cardanico, in modo che gli alberi motore siano flessibili e pieghevoli. A tale scopo, gli alberi motore, i giunti e la biella sono stati fabbricati in







")

