

di Marco de’ Francesco ♦︎ La camera 3D della multinazionale tedesca riesce ad acquisire sino a 46mila profili al secondo ad alta risoluzione. E le applicazioni sono molteplici: dal controllo qualità nel campo dell’elettronica alla manutenzione predittiva di treni e binari
Si chiama Ranger3 la camera 3D di Sick in grado di acquisire sino 46mila profili al secondo ad alta risoluzione. Il dispositivo della multinazionale tedesca dei sensori trova applicazione in fabbrica, nelle ispezioni di precisione necessarie per il controllo di qualità nel campo dell’elettronica; e fuori dalla fabbrica, ad esempio per la manutenzione predittiva di treni e binari. La camera 3D è un sistema di visione. E proprio qualche giorno fa Serena Monti, product manager vision system di Sick, ha messo a confronto le tre tecnologie per l’acquisizione di immagini tridimensionali: la triangolazione laser, il tempo di volo o la stereoscopia. L’occasione, lo Smart Vision Forum di Bologna, evento nato dalla collaborazione tra AIdAM (associazione italiana di automazione meccatronica) e Anie Automazione, e organizzato dall’operatore globalizzato di fiere Messe Frankfurt. Verso quale tecnologia, fra le tre citate, deve orientarsi l’azienda? Dipende dal task che si vuole assegnare al device, dal processo che si intende servire. Come vedremo, per l’ispezione dei manufatti, l’assemblaggio, il riconoscimento ottico dei caratteri la prima è più affidabile; per la depallettizzazione, l’anticollisione per gli agv (veicoli a guida automatica) vanno bene anche la seconda e la terza, utile anche nella presa da cassetta. Vanno valutati anche i costi di sistema.



La telecamera che acquisisce fino a 46mila profili al secondo
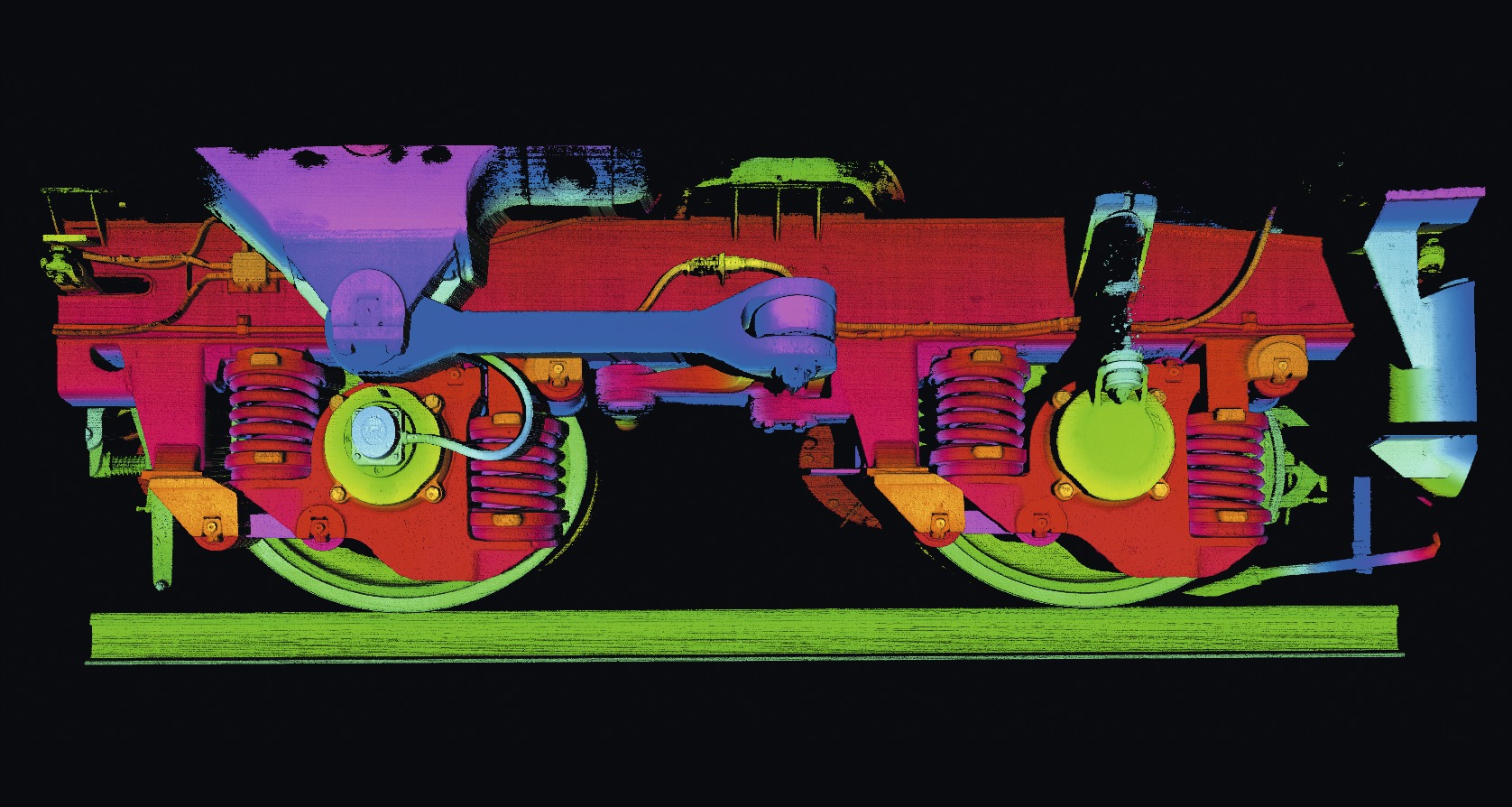
Controllo di qualità dei prodotti? Manutenzione predittiva delle macchine? C’è una modalità diversa, rispetto a quelle usualmente utilizzate in fabbrica. La camera Ranger3 della multinazionale tedesca Sick, evoluzione della famiglia RangerE, rappresenta un nuovo standard per immagini 3D ad alta velocità. Si pensi che può acquisire fino a 7mila profili al secondo, se viene utilizzato tutto il sensore, e 46mila se ne viene utilizzato una parte, come accade, spiega l’azienda, quando vengono inquadrati campi larghi in cui transitano però oggetti di altezza limitata. Con questo sistema, difetti che sfuggirebbero all’occhio umano sono subito notati: l’analisi coglie il più piccolo dettaglio. Anche perché la risoluzione delle immagini è considerevole: 2.560×832 pixel. In sintesi, secondo l’azienda «la maggiore risoluzione la rende adatta a risolvere applicazioni di ispezione e misura ad alta precisione, tipiche del controllo qualità nel campo dell’elettronica, mentre l’altissima velocità permette l’impiego anche in applicazioni sfidanti, come la scansione di treni e binari, per manutenzione preventiva». Lo strumento è molto compatto, e dispone di robusti connettori per le macchine industriali. Secondo la Monti, «la camera sfrutta il principio di triangolazione laser, di cui parleremo più avanti, e deve essere associata ad un laser per creare una geometria ad hoc per il sistema.»

Le quattro principali funzioni dei sistemi di visione e la tecnologia a triangolazione laser
Ma a cosa servono i sistemi di visione? Secondo la Monti, assolvono a queste quattro funzioni principali: ispezione; posizionamento; misura; e lettura codici e Ocr (riconoscimento ottico dei caratteri). Esistono peraltro differenze sostanziali tra la visione 2D e quella 3D. Per la Monti, mentre la prima consente di apprezzare le caratteristiche superficiali degli oggetti e necessita di un contrasto tra l’oggetto e lo sfondo, la seconda permette di apprezzare le differenze di altezza e non necessita di contrasto. Abbiamo appena visto che Ranger3 è una tecnologia per la visione in 3D a triangolazione laser. Non è l’unica sul mercato. Fra quelle note e diffuse, ce ne sono altre due. Quella a tempo di volo e quella in stereoscopia. Affrontiamo anzitutto il funzionamento della prima tipologia. In pratica i sensori sfruttano il principio della triangolazione, che permette di misurare la lunghezza del lato di un triangolo, conoscendo quella degli altri due. Il laser proietta sull’oggetto una lama che ne disegna il profilo, recepito dal sensore; infine, la posizione del laser nel sensore viene misurata in ciascuna colonna di pixel in parallelo.
Naturalmente, i sistemi di triangolazione laser hanno bisogno di un movimento relativo. «Si creano tanti profili: è un po’ come con la Tac». Peraltro, a causa della geometria del sistema, ci sono punti in cui il profilo dell’oggetto non viene visto dalla camera: sono le cosiddette occlusioni. Ma sono questioni tecniche che andrebbero affrontate separatamente, in articoli specialistici. Ma quali sono le caratteristiche principali del sistema a triangolazione? Un campo di vista tipico da un centimetro a due metri; una risoluzione fino a due Mpixel; una enorme accuratezza, potenzialmente da alcuni nanometri a millimetri, a seconda delle dimensioni del campo inquadrato; e una frequenza di acquisizione fino a 30KHz. I punti deboli, secondo la Monti, sono le occlusioni e la necessità di movimento; quelli di forza, l’alta risoluzione e l’alta velocità. Quali, dunque le applicazioni nel mondo industriale e manifatturiero in particolare? Grazie all’alta risoluzione, l’ispezione dei manufatti, l’assemblaggio, il riconoscimento ottico dei caratteri; grazie all’alta velocità, la manutenzione predittiva, il controllo sagoma e il porzionamento cibo; grazie all’assenza di contrasto, la presa da cassone, la presa da tappeto, e il controllo completezza.
Le altre tecnologie per i sistemi di visione: il tempo di volo
Un sistema di visione a tempo di volo (time of flight, Tof) è uno strumento che permette di stimare real time la distanza tra la telecamera e gli oggetti inquadrati, misurando il tempo che occorre ad un impulso luminoso per percorrere il tragitto telecamera-oggetto-telecamera (tempo di volo). In pratica il sistema emette una luce continua modulata ad una certa frequenza; si misura lo sfasamento tra segnale inviato e riflesso, e pertanto si crea una mappa di profondità 3D. Le principali caratteristiche sono il campo di visione tipico molto ampio, da uno a 15 metri; una risoluzione bassa, fino a 640 per 480px; una scarsa accuratezza, da 7 a 15 millimetri; e una frequenza di acquisizione di circa 20 fotogrammi al secondo. I limiti del sistema sono già evidenti; il punto di forza è il campo di vista molto ampio. Tra le applicazioni industriali tipiche, il dimensionamento oggetti, la depallettizzazione, l’anticollisione per gli agv, e il conteggio accessi.
Le altre tecnologie per i sistemi di visione: la stereoscopia
Storicamente la stereoscopia è una tecnica di realizzazione e visione di immagini, fotografie, disegni e filmati, in grado di trasmettere una illusione di tridimensionalità, simile a quella generata dalla visione binoculare del sistema visivo umano. Risale al 1832, e cioè a quando sir Charles Wheatstone realizzò i primi esperimenti con coppie di disegni affiancati. Sei anni dopo lo scienziato pubblicò un trattato sulla visione binoculare. E oggi? Associando immagini 2D dello stesso oggetto prese da angoli diversi e combinando le informazioni di posizione degli oggetti, è possibile ricostruire la mappa di distanze 3D. Peraltro, è possibile utilizzare una luce strutturata per aumentare il numero di caratteristiche che possono essere localizzate nelle diverse immagini. Si proietta cioè un pattern noto su un oggetto o una scena; il modo in cui l’immagine proiettata si deforma colpendo un oggetto permette ai sistemi di visione di calcolare la profondità di questo. Quanto alle caratteristiche dei sistemi a stereoscopia, la Monti segnala un campo di vista tipico tra i 20 centimetri e i due metri, la risoluzione sino a 2 Mpixel, l’accuratezza da mezzo a cinque millimetri, e la frequenza di circa 25 fotogrammi al secondo. Tra i limiti del sistema, la lentezza di elaborazione per immagini ad alta risoluzione; tra i punti di forza, l’alta risoluzione e la bassa sensibilità ai riflessi. Tra le applicazioni industriali tipiche, la presa da cassetta, la depallettizzazione, la verifica contenuto, l’anticollisione e la classificazione oggetti.
E dunque? La tecnologia va scelta in base alle esigenze
Secondo la Monti, dunque, ciascuna tecnologia 3D ha punti di forza e limitazioni diverse. L’azienda deve valutare l’acquisto in base ad esigenze concrete. Occorre valutare il tipo di processo che si intende servire, e in base a ciò quali fra queste funzioni sia più rilevante: risoluzione, velocità, acquisizione da fermo o in movimento, costo del sistema, caratteristiche fisiche degli oggetti (trasparenza, colore, lucentezza), dimensione del campo. Come si diceva, queste tecnologie diverse sono state messe a confronto allo Smart Vision Forum di Bologna, evento nato dalla collaborazione tra AIdAM e Anie Automazione, e organizzato da Messe Frankfurt Italia. È stato molto partecipato, con 450 adesioni. Secondo Donald Wich, amministratore delegato Messe Frankfurt Italia, d’altra parte «la competitività delle nostre imprese è basata su un aumento della produttività e queste tecnologie sono importanti per il raggiungimento di obiettivi di crescita e per favorire un’occupazione sempre più qualificata».




")
")



